
I have finished the latest version of the DIY Pick and Place controller software to work with the new KFlop motion controller and our latest custom USB controller board.
I decided to build this application using the ModernUI theme.
The camera uses Emgu CV from emgu.com which uses a basic USB microscope camera to look down on the PCB to locate the parts with a cross-hair line on the camera's image.
I plan to add component checking at a later stage for part alignment using the base camera and led array.
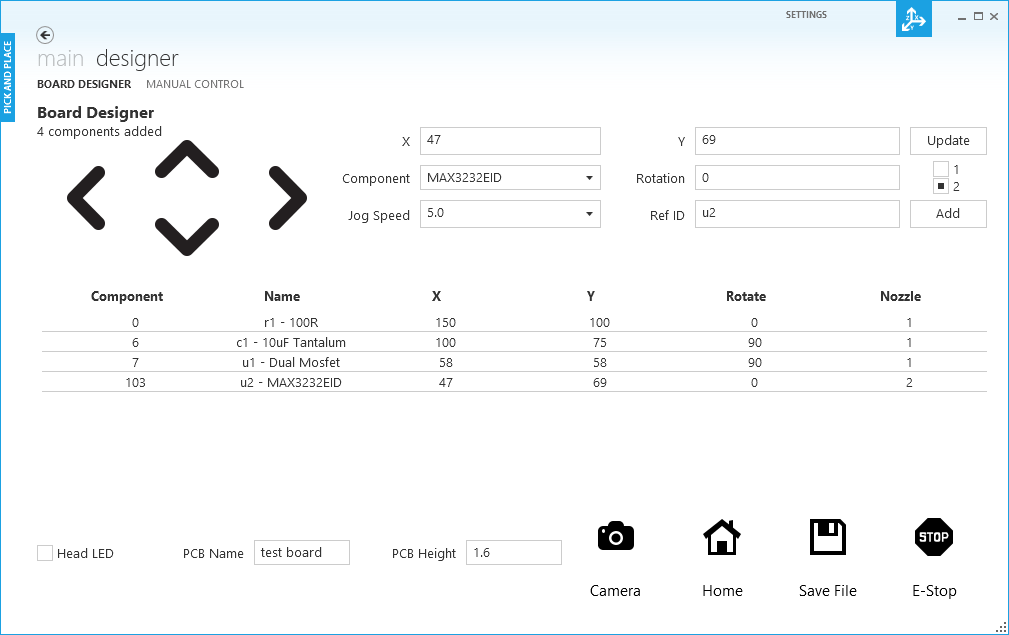
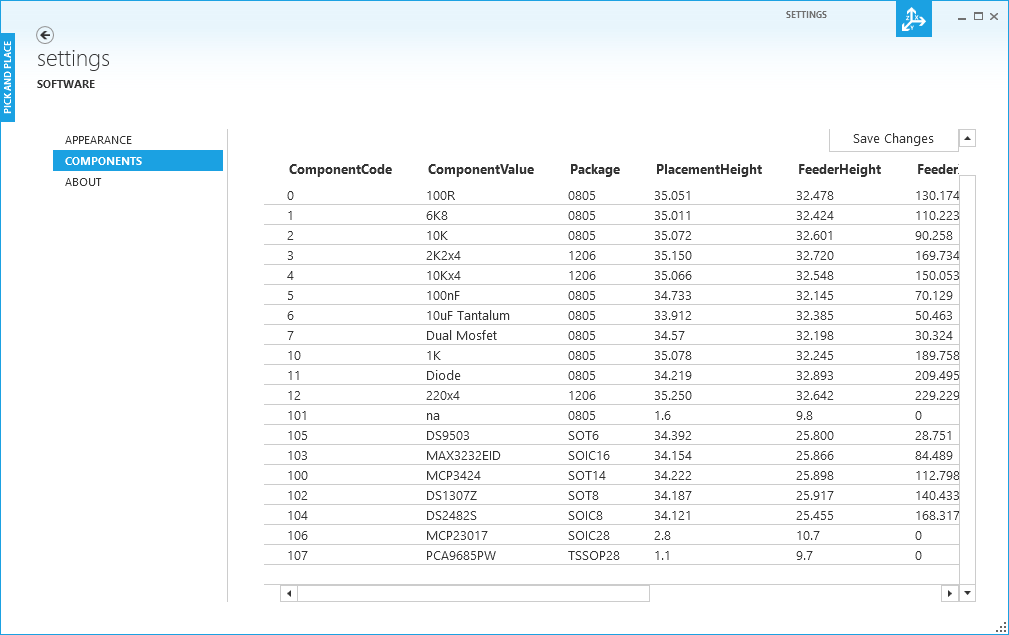
The camera location is saved into a dataset with its X and Y locations and the board designer has form fields to select the active component, its rotation, the picker nozzle which is used and a reference for the part.
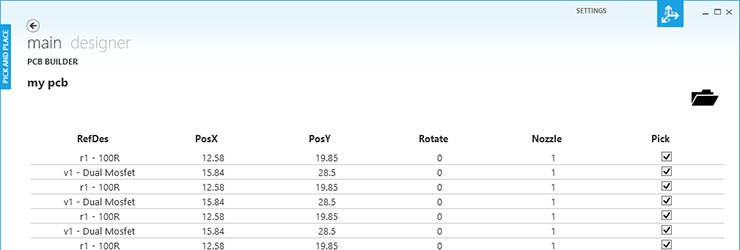
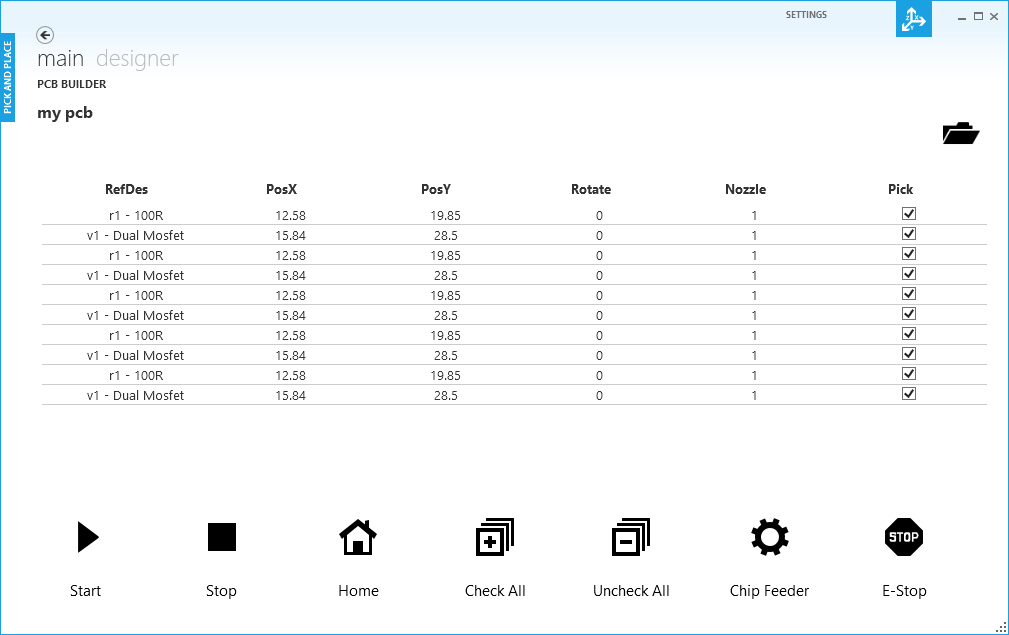
Once all of the board components have been added it is saved into an XML data file and the PCB Builder code adds the correct offset depending on the selected picker nozzle for the build process.
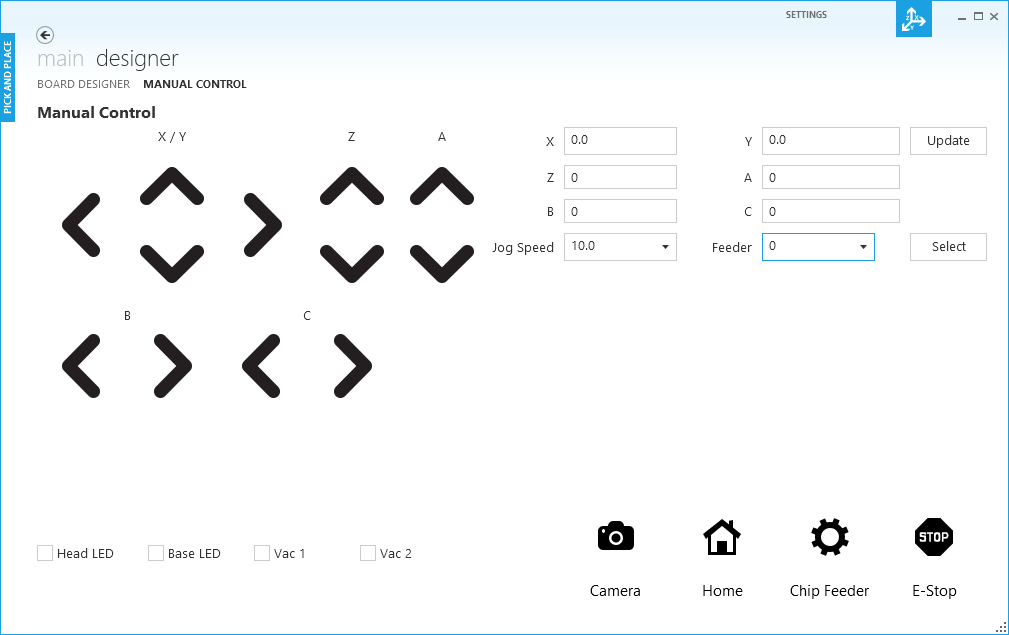
I have also added a Manual Control screen (see screenshots on right) which has controls for all the stepper axis drivers and also control the USB controller’s hardware for the two LED drivers, two valves and for the chip feeder vibration motor. There is also a select menu which activates the component feeder system.
The code for this new update is available to download on my GitHub page at github.com/briandorey



Comments