
 We purchased an Acuter Merlin/Orion Motorised AZ Mount to use with our Canon 5D Mk 2 camera on a 50-foot telescopic mast fitted to our Land Rover Defender for high-level photography.
We purchased an Acuter Merlin/Orion Motorised AZ Mount to use with our Canon 5D Mk 2 camera on a 50-foot telescopic mast fitted to our Land Rover Defender for high-level photography.
Initial tests using the Merlin mount and a software driver (Papywizard) to move the Merlin mount and the Canon EOS Utility software to view what the camera sees via a long USB cable and to take photos.
We found using a tablet pc or laptop there wasn't enough screen space to use the Canon EOS Utility and Papywizard at the same time so we could pan and tilt the camera and still see the live view. To overcome this problem we researched options to make a hardware-based controller to send the serial commands the Merlin head requires for remote control. We also wanted to be able to control a servo-driven system which we have added to the remote head which allows us to remotely zoom the Canon SLR lenses.
Microchip has a 40-pin DIL Microprocessor (Microchip PIC16F887 Pic Processor) which has the required Analogue to Digital converters, Serial Communication and Pulse Width Modulators to fulfil all the needs of the project.
With help from the forums and developers' info available online for the Merlin mount, we were able to program a set of basic commands to do the following using the Wii Nunchuk handset as the basis for a handheld controller.
- High-Speed Pan and Tilt of the Merlin Mount
- Slow Speed Pan and Tilt of the Merlin Mount
- Remote camera triggering via the Merlin Mount via an extra button added to the Wii Nunchuk
- Remote Zoom of the cameras lens via Wii Nunchuk
The Merlin head was modified with a new 8-pin locking socket on the side to replace the data and power connectors, the old power socket was replaced with a 3.5 jack socket which links to the servo remote zoom assembly.
The main project comprises two sections, the remote zoom system and the Merlin Head controller.
Remote Zoom System.
Parts used:
Futaba RC Servo with PCB removed to allow continuous rotation
H-bridge (BAL6686), from servo for motor control
Microchip PIC16F887 Pic Processor
4Mhz crystal
7805 Power Regulator
Various capacitors for chip and regulator
Lens Gear for follow focus unit to fit Canon 24-105mm lens (purchased from eBay as much cheaper than online dealers)
Cog to fit servo and Lens Gear (from RC Car shop)
Using a Futaba RC Servo with PCB removed to allow continuous rotation we machined a mount to fit under the camera to hold the servo in position to allow the cogs on the Lens Gear system to mesh with a cog on the servo output. The servo motor was connected to the 3.5mm jack socket on the Merlin head and this was connected to the new circuit board which houses the new PIC processor and power system. The PWM output from the PIC was fed into the H-bridge (BAL6686) chip which was removed from the servos control PCB.
The zoom servo is activated by pressing and holding the lower Wii Nunchuk button and pushing the joystick back and forward. The AD Converter in the PIC converts the analogue input into 4 different speed bands for each direction to allow fine control over the camera's zoom.
The cog on the servo is set up with a slipping clutch so it won't damage the lens or servo if the motor is kept running at each end of the camera's zoom levels.
Merlin Head Wii Nunchuk Controller
Parts used: as above.
The Merlin head uses a serial command communication system along a single wire to the main head unit. The basic commands are available on the Papywizard developer's site and give basic movement and camera control.
The PIC processor was programmed with the following commands for the Merlin head:
- High-Speed Pan and Tilt of the Merlin Mount
- Slow Speed Pan and Tilt of the Merlin Mount
- Remote camera triggering via the Merlin Mount via an extra button added to the Wii Nunchuk
The normal movement of the Wii Nunchuk joystick gives the high-speed pan and tilt and pressing the smaller button on the handset slows the control to around a quarter speed to allow fine control over the head. An additional button was fitted to the top of the Nunchuk and this was configured to trigger the camera's shutter via the Merlin Head.
The photos below show parts of the build process.
I will add a PCB design and circuit layout when they are completed.
The Wii Nunchuk PCB with all the components removed and tracks cut to allow new wiring.
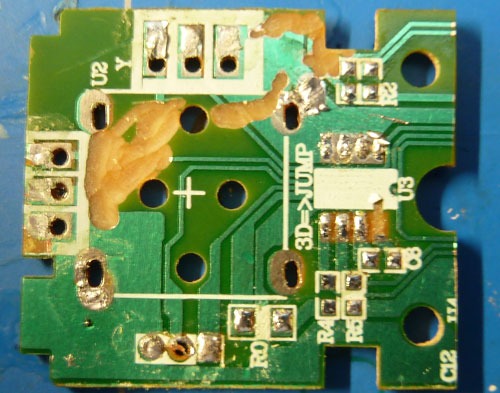
The joystick was soldered back in and the corner pins on the variable resistors are linked, these are connected to + 5 volts and ground. The middle pins are connected to 2 wires which connect to the ADC inputs on the processor. Extra wires were added to the two front switches and to the new top camera trigger switch.
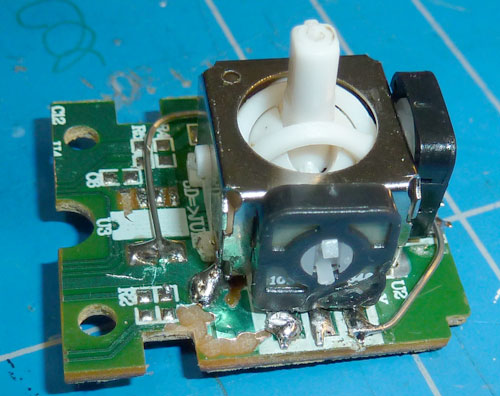
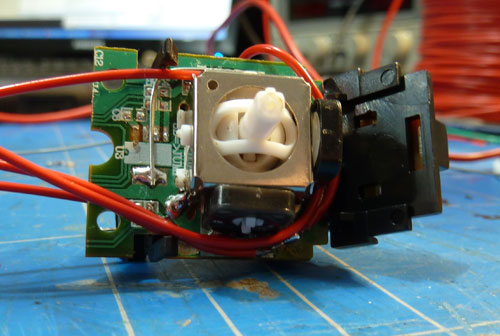
Wires connected to the Wii PCB.
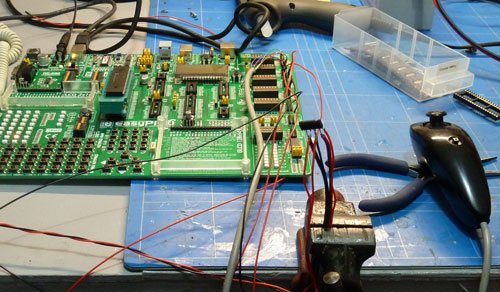
The circuit has been developed using a Microchip development board. The small chip in the foreground mounted in the vice is the HBridge servo controller.
Bottom view of the zoom servo fitted to the camera mount.

Side view of the zoom servo fitted to the camera mount.

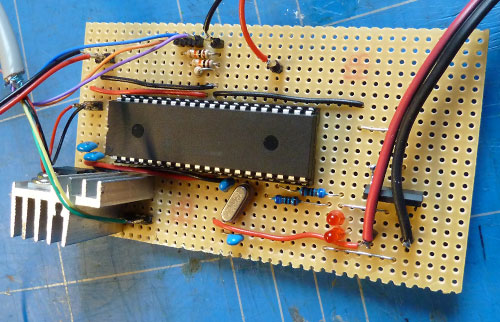
The design mockup on the EasyPIC6 development board was transferred to a breadboard for final testing and then the circuit was built on an offcut of stripboard.
The source code for the project can be downloaded in a zip file here. You need the compiler from mikroe.com to compile and program to the processor.
The circuit schematic can be downloaded here (PDF Format) including the parts required. The H-Bridge from the Servo isn't included as the pin connections on the H-Bridge vary depending on the model used. Any H-Bridge with a 5V and minimum of 1A rating should be ok for the servo zoom control
The completed PCB with 5V 7805 regulator with the heatsink on the bottom-left.
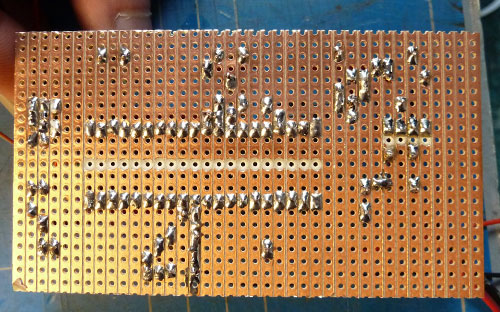
Back view of the board
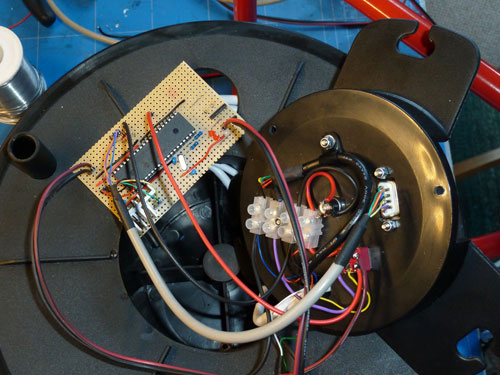
The board was then connected to a 9-way D connector for the Wii remote and fitted inside the main cable reel. A DPDT switch is used to switch between the Wii remote control and the USB serial connection from the PC or Mac
The completed head system with cable reel, tablet computer, camera and remote cable, Merlin head and power lead.




Comments